


Autonomous robots?
03
Oct
Autonomous robots are a denomination for those who are within the environmental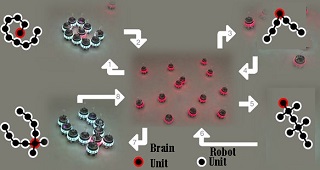 limits, can achieve the desired goals (by humans or by tasks organized in an algorithm) in these unstructured environments without a human help, by this they are in certain levels.
limits, can achieve the desired goals (by humans or by tasks organized in an algorithm) in these unstructured environments without a human help, by this they are in certain levels.
For example, within a factory where mechanical tasks are performed, to avoid accidents, their geographic space is limited and deficient to detect the defect that can be fulfilled by a forged task, since a space robot should have fewer limits and be the most autonomous autonomous, for being without possibility of direct human action and having communication difficulties due to a distance.
The project called SWARM, funded by the European Union and we have already made a post, now has the first multi-robot system of autonomous assembly that has sensory-motor coordination observing similar robots around them, they will vary in shape and height in white according to a task and / or work environment.
A central “cerebral” central coordinating system, all of us, through a system called MNS (Mergeable Nervous System), and thus are reconfigured observing different capacities but combined by a single central controller.
They can also split up and perform self-repair tasks, eliminating defective body parts, including a brain unit with some defect, of course, one can define which are defeats and self-repairs.
In autonomous robots, learning and strategy according to the environment, what you can do with your autonomy increases, but for what you can print, the article is still not the case.
The current model has 10 units, and the authors point out without paper published in Nature Communications, claim that the Project is scalable, both in terms of computational resources for robotic control and time of reaction to stimulus, whithin the system.








