


Agent environments and an example
17
May
The example that Norvig and Russel (2010) will give to describe what an environment in 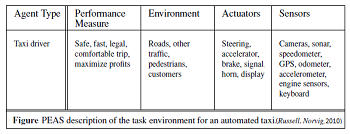 Artificial Intelligence is happy and unhappy at the same time, happy because it has become something real 8 years after the edition of the book, a taxi as a stand-alone vehicle, and unfortunate because there are already cases of accidents with autonomous vehicles.
Artificial Intelligence is happy and unhappy at the same time, happy because it has become something real 8 years after the edition of the book, a taxi as a stand-alone vehicle, and unfortunate because there are already cases of accidents with autonomous vehicles.
What is called environment is described as PEAS (Performance, Environment, Actuators and Sensors) (figure on the side), whose first stage is to design the task environment.
The agent will be different from a software (a softbot or webcrawler), but it is didactic.
The suggested environment was a stand-alone taxi, which at the time was “little beyond the capabilities of existing technology,” but on page 28 will describe a robot with this function, the fortuitous side of the example as the authors say is a ” completely open” and “there is no limit to the new combinations of circumstance that may arise”. (Norvig, Russel, 2010: 40)
What performance measures will be desired: arrive at the correct destination, minimize the correct destination time, fuel consumption and wear, traffic violations, disturbances and safety to passengers and other drivers, and if there are conflicts make decisions (this is one of the reasons for the accident to protect the passengers caused a hit by a passer-by).
The next step is to map an autonomous car environment, it must deal with a variety of roads, from rural lanes and urban lanes to 3, 4 and up to 5 lanes, with lanes, other vehicles, road works, police cars, puddles, and potholes, and should interact with potential and actual passengers.
Actuators for an automated taxi include those available to a human driver: control over the engine through the throttle and control over steering and braking. some optional choices of communication with other vehicles with arrows and even horn, and with passengers who will need voice synthesizers.
The basic taxi sensors will include one or more controllable video cameras so they can see the road; you can increase them with infrared or sonar sensors to detect distances to other cars and obstacles.
The problems of safety and conviviality with human drivers is evident, but thanks to this example of success made in 2010, today we have maps, GPS, road signs, and many others advances.
NORVIG, P.; RUSSEL, P. (2010) Artificial Intelligence: A Modern Approach 3nd ed., Upper Saddle River, New Jersey: Prentice Hall.








