


Robôs autônomos ?
03
out
Robôs autônomos é a denominação para aqueles que dentro de limites ambientais,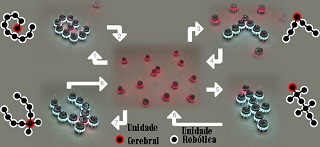 podem realizar os objetivos desejados (por humanos ou por tarefas organizadas em um algoritmo) nestes ambientes desestruturados sem a ajuda humana, por isto o são em certos níveis.
podem realizar os objetivos desejados (por humanos ou por tarefas organizadas em um algoritmo) nestes ambientes desestruturados sem a ajuda humana, por isto o são em certos níveis.
Por exemplo, dentro de uma fábrica onde tarefas mecânicas são realizadas, para evitar acidentes o seu espaço geográfico é limitado e deve detectar algum defeito que possa cumprir determinada tarefa fora do previsto, já um robô espacial deve ter menos limites e ser o mais autonomo possível, por estar sem a possibilidade de uma ação humana direta e ter dificiuldades de comunicação devido a distância.
O projeto chamado SWARM, financiado pela União Européia e que já fizemos um post, agora tem o primeiro sistema multi-robôs de autono montagem que tem coordenação sensório-motor observando robôs parecidos ao seu redor, eles vão variar de forma e tamanho conforme sua tarefa e/ou ambiente de trabalho.
Um ssitema “cerebral” central coordena todos eles, através de um sistema chamado MNS (Sistema Nervoso Combinal, em português), e assim são reconfigurados absorvendo diferentes capacidades mas combinadas por um único controlador central.
Eles também podem se dividir e realizar tarefas de auto reparo, eliminando partes do corpo com defeito, incluindo uma unidade cerebral com algum defeito, claro que pode-se definir que estes defeitos e auto reparos possuem limitações conforme a complexidade.
Em robos autônomos, o aprendizado refere-se a aprender e ganhar novas capacidades sem assistência externa e ajustar estratégias de acordo com o ambiente, o que pode fazer com que sua autonomia aumente, mas pelo que se pode ler do artigo ainda não é o caso.
O modelo atual tem 10 unidades, e os autores apontam no paper publicado na Nature Communications, afirmam que o projeto é escalável, tanto em termos de recursos computacionais para controle robótico quanto tempo de reação para estímulo, dentro do sistema.
Olhando para o futuro, a equipe sugere que os robôs provavelmente serão projetados para adaptação aos requisitos de tarefa em mudança e não mais somente para tarefas específicas.








