


Arquivo para maio 17th, 2018
Ambientes de agentes e um exemplo
17
mai
O exemplo que Norvig e Russel (2010) vão dar para descrever o que é um ambiente na 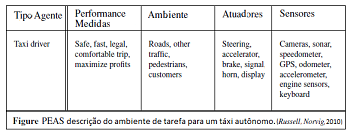 Inteligência Artificial é feliz e infeliz ao mesmo tempo, feliz porque tornou-se algo real 8 anos após a edição do livro, um táxi como veículo autónomo, e infeliz porque já há casos de acidentes com veículos autónomos.
Inteligência Artificial é feliz e infeliz ao mesmo tempo, feliz porque tornou-se algo real 8 anos após a edição do livro, um táxi como veículo autónomo, e infeliz porque já há casos de acidentes com veículos autónomos.
O que chama de ambiente é descrito como PEAS (Performance, Ambiente, Atuadores e sensores, traduzidos ao português) (figura ao lado), cuja primeira etapa é projetar o ambiente da tarefa.
O agente será diferente de um software (um softbot ou webcrawler), mas é didático.
O ambiente sugerido era de um táxi autônomo, o que na época era um “pouco além das capacidades da tecnologia existente”, mas na página 28 vai descrever um robô com esta função, o lado fortuito do exemplo como dizem os autores é uma tarefa “completamente aberta” e “não há limite para as novas combinações de circunstância que podem surgir” (Norvig, Russel, 2010, p. 40)
Que medidas de desempenho serão desejadas: chegar ao destino correto, minimizar o tempo de destino correto, o consumo de combustível e desgaste, as violações de tráfego, distúrbios e segurança aos passageiros e outros condutores, e se houver conflitos tomar decisões (eis um dos motivos do acidente para proteger os passageiros causou um atropelamento de uma transeunte).
O passo seguinte é mapear um ambiente de um carro autónomo, deverá lidar com uma variedade de estradas, desde pistas rurais e vielas urbanas a rodovias de 3, 4 e até 5 pistas, havendo nas pistas além de outros veículos, pedestres, animais vadios, obras na estrada, carros da polícia, poças, e buracos, e deve interagir com passageiros em potencial e reais.
Os atuadores para um táxi automatizado incluem aqueles disponíveis para um motorista humano: controle sobre o motor através do acelerador e controle sobre direção e frenagem.
algumas escolhas opcionais de comunicação com outros veículos com setas e até buzina, e com os passageiros que necessitarão de sintetizadores de voz.
Os sensores básicos do táxi incluirão uma ou mais câmeras de vídeo controláveis para que possam ver a estrada; pode aumentá-las com sensores de infravermelho ou
sonar para detectar distâncias para outros carros e obstáculos.
Os problemas de segurança e convívio com motoristas humanos é evidente, mas graças a este exemplo de sucesso feito em 2010, hoje tem-se mapas, GPS, sinalizadores em estradas, e muitos outros avanços.
NORVIG, P.; RUSSEL, P. Artificial Intelligence: A Modern Approach 3nd ed., Upper Saddle River, New Jersey: Prentice Hall, 2010.
